平衡车制作---原理篇
前言
本篇教程内容主要来自于《直立平衡车模参考设计方案》,且这里是从概念层面讲述的并没有具体的控制理论方面的内容。有了这些概念方面的知识制作一个初级版的平衡车已经足够了。

直立控制
直观感受
悄悄告诉你个秘密:其实你天生就已经知道了直立控制的原理。不信的话,你用手指撑个木棍就知道了,这其中已经包含了直立控制原理。根据控制理论的知识可以将其抽象为一个负反馈系统。

这样对于两轮车能够直立而言,我们有一个直观的感受:车模向前倾斜轮子向前加速,车模向后倾斜轮子向后加速,车模便可以完成直立。

这样的直观感受在我们后期的制作调试过程中是非常重要的。接下来稍微深入了了解下直立控制的原理。
内部机理
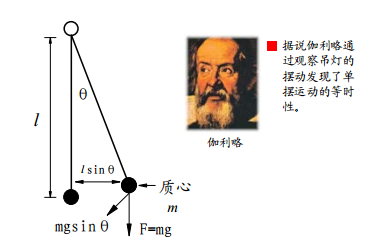
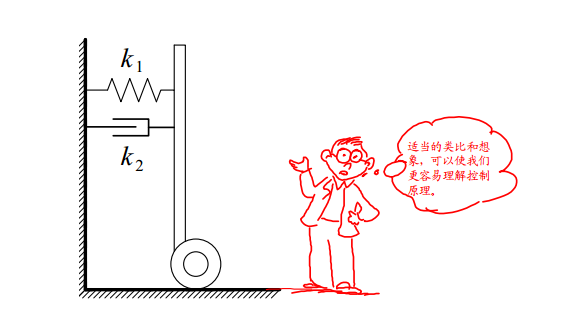
- 重力场中使用细线悬挂着重物经过简化便形成理想化的单摆模型
- 直立着的车模可以看成放置在可以左右移动平台上的倒立着的单摆(倒立摆)

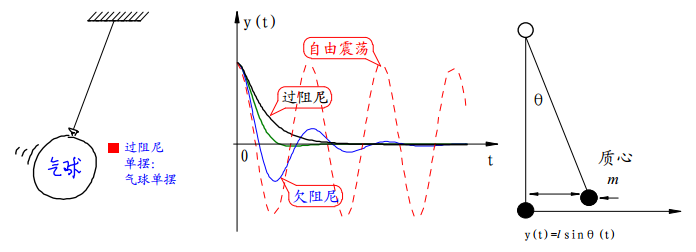
单摆能够稳定在垂直位置需要两个条件:
- 受到与位移(角度)相反的回复力;
- 受到与运动速度(角速度)相反的阻尼力;
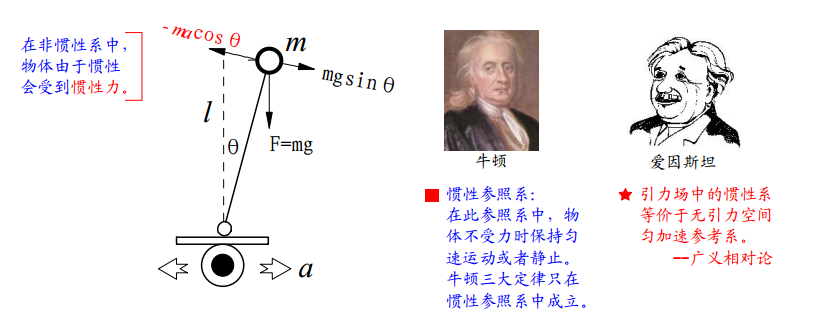
(非惯性系,以车轮作为坐标原点)分析倒立摆受力,它就会受到额外的惯性力,该力与车轮的加速度方向相反,大小成正比。(假设a和θ成正比比例系数为k1)(θ较小,为便于分析此处进行了线性化) $$ F = mgsinθ - macosθ ≈ mgθ - mk1θ $$ 如果比例 k1>g,那么回复力的方向便于位移方向相反了
类比于单摆平衡的条件,为了使得倒立摆能够尽快地在垂直位置稳定下来,还需要增加控制阻尼力(方向与偏角的速度成正比方向成反比)。 则
$$
𝐹=𝑚𝑔𝜃−𝑚k1𝜃−𝑚𝑘2𝜃’
$$
==只要保证在k1>g,k2>0的条件下,可以使得车模像单摆一样维持在直立状态。==其中两个控制参数:
-
k1决定了车模是否能够稳定到垂直平衡位置,它必须大于重力加速度;
-
k2决定了车模回到垂直位置的阻尼系数,选取合适的阻尼系数可以保证车模尽快稳定在垂直位置
根据以上分析可以得到,控制车模直立的条件如下:
- 能够精确测量车模倾角θ 的大小和角速度θ ' 的大小;
- 可以控制车轮的加速度;
通过惯性测量单元IMU可以测得车模倾角和角速度,通过改变施加在电机上的PWM值可以改变车轮的加速度,到此根据直立控制原理我们已经可以搭出可以直立的车模了,但该车模的抗干扰能力很弱:例如车模受到前进方向的轻微扰动,车模便会向前倾斜并一直向前加速直至最终倒下。为提高车模的抗干扰能力还需要添加速度控制。
速度控制
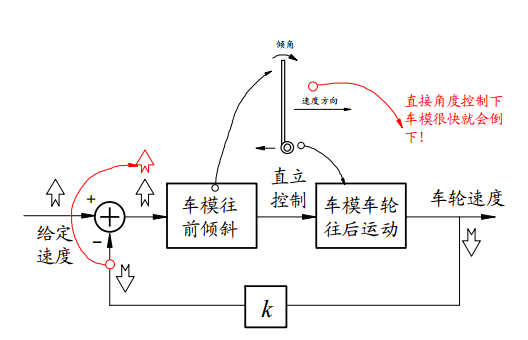
由于速度控制过程中需要始终保持车模的直立,平衡车的速度控制过程更加复杂,这里仅从直观感受上分析以下:假设车模开始保持静止,然后增加给定速度,为此需要车模往前倾斜以便获得加速度。在车模直立控制下,为了能够有一个往前的倾斜角度,车轮需要往后运动,这样会引起车轮速度下降(因为车轮往负方向运动了)。由于负反馈,使得车模往前倾角需要更大。如此循环,车模很快就会倾倒。原本利用负反馈进行速度控制反而成了“正”反馈。
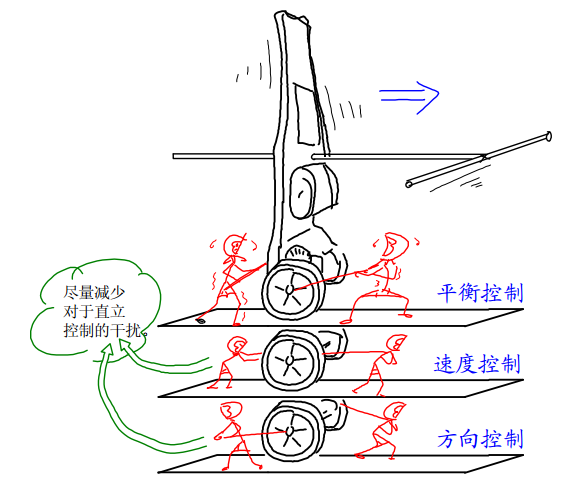
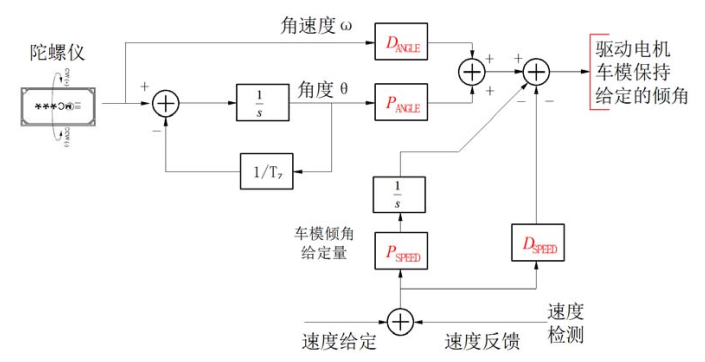
速度控制实际是通过控制车模的倾角实现的,若采用此种方式会涉及到PID级联的一些知识(后面单独分析,若想实现速度恒定或站立在倾斜的平面上需要采用此种方式)。根据《直立平衡车模参考设计方案》速度控制章节的分析我们知道:经过一系列的简化改进,速度控制已经演变成的对电机的直接控制,但需要注意直立控制是平衡控制的核心,速度控制要尽可能减少对直立控制的干扰因此速度控制要平滑滤波(减小控制参数或将速度控制量分配到多个直立控制周期输出)。
方向控制
方向控制实际是通过对电机的差分控制实现的,方向控制也要尽可能减少对直立控制的干扰。

总结
三个分解后的任务各自独立进行控制。由于最终都是对同一个控制对象(车模的电机)进行控制,所以它们之间存在着耦合。
这三个任务中保持车模平衡是关键。由于车模同时受到三种控制的影响,从车模平衡控制的角度来看,其它两个控制就成为它的干扰。因此对车模速度、方向的控制应该尽量保持平滑,以减少对于平衡控制的干扰。